Engineer Program
Program upgrade skill di bidang engineering, dari dasar hingga mahir.



Spesial Program
Program khusus melalui platform mitra resmi dokter mekanik academy seperti Udemy, Prakerja, dan Kampus Merdeka.
Line Follower Robot adalah jenis robot otomatis yang dirancang untuk mengikuti jalur atau garis yang biasanya ditandai dengan warna tertentu, seperti hitam atau putih, pada permukaan yang kontras.Pada Line follower robot analog menggunakan komponen analog seperti sensor inframerah yang langsung dihubungkan ke motor tanpa melibatkan mikrokontroler. Sinyal dari sensor secara langsung mengontrol kecepatan dan arah motor berdasarkan intensitas cahaya yang diterima, sehingga cenderung lebih sederhana namun kurang presisi. Robot analog bekerja secara linear, di mana semakin dekat ke garis, semakin cepat robot berbelok.
Pengertian Robot Line Follower

Line Follower Robot adalah jenis robot otomatis yang dirancang untuk mengikuti jalur atau garis yang biasanya ditandai dengan warna tertentu, seperti hitam atau putih, pada permukaan yang kontras.Pada Line follower robot analog menggunakan komponen analog seperti sensor inframerah yang langsung dihubungkan ke motor tanpa melibatkan mikrokontroler. Sinyal dari sensor secara langsung mengontrol kecepatan dan arah motor berdasarkan intensitas cahaya yang diterima, sehingga cenderung lebih sederhana namun kurang presisi. Robot analog bekerja secara linear, di mana semakin dekat ke garis, semakin cepat robot berbelok.
Cara Kerja Roobot Line Follower yaitu dengan menangkap bias cahaya yang dipantulkan pada papan menggunakan sensor. Sensor garis dibangun dari dua komponen utama yaitu IR LED (Infrared LED) dan Photodiode.
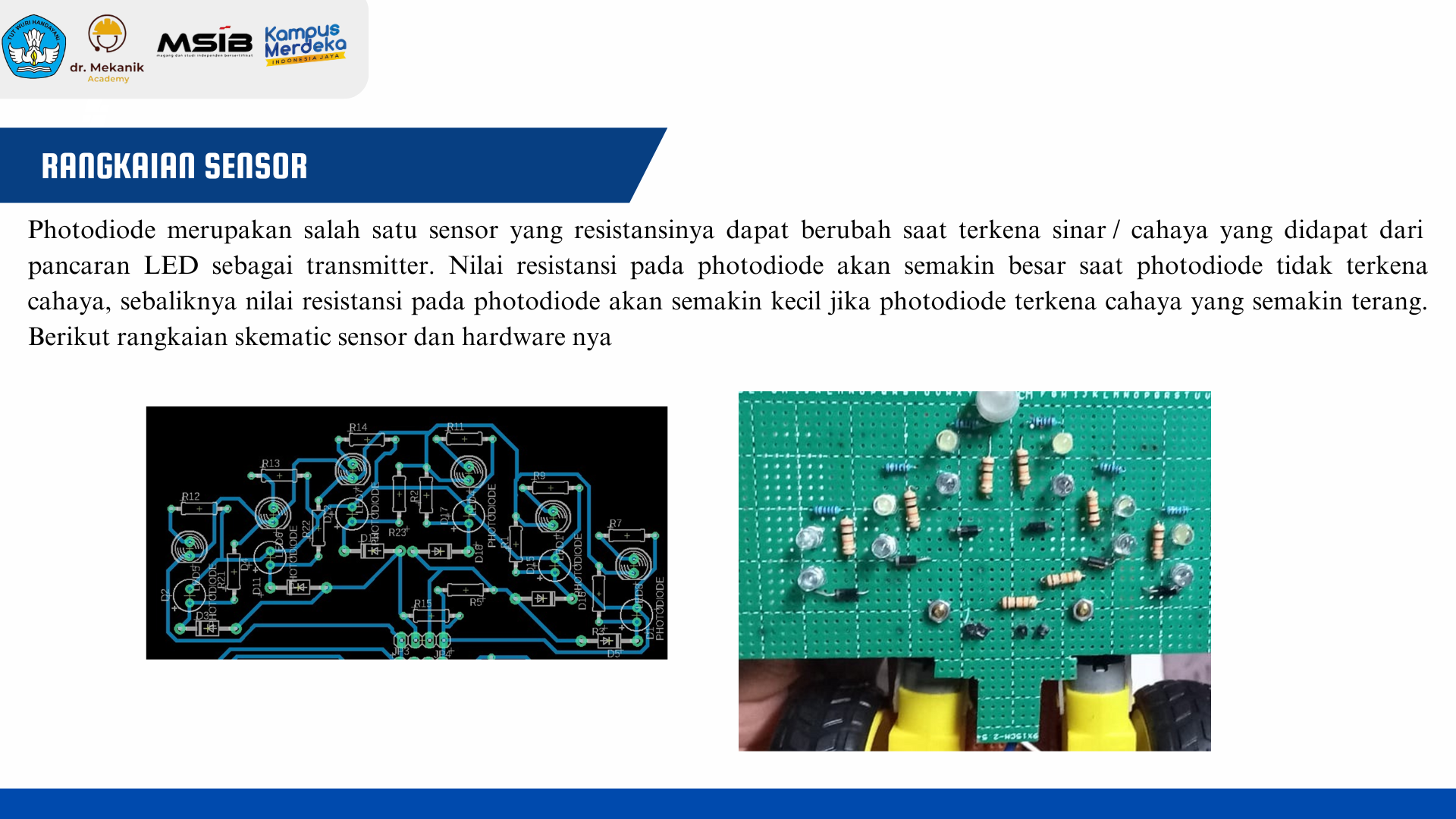
Photodiode merupakan salah satu sensor yang resistansinya dapat berubah saat terkena sinar / cahaya yang didapat dari pancaran LED sebagai transmitter. Nilai resistansi pada photodiode akan semakin besar saat photodiode tidak terkena cahaya, sebaliknya nilai resistansi pada photodiode akan semakin kecil jika photodiode terkena cahaya yang semakin terang. Ilustrasi mengenai kerja sensor photodiode dapat dilihat pada gambar dibawah

Cara kerja Photodiode ketika elektron yang dihasilkan tersebut masuk ke pita konduksi, maka elektron tersebut akan mengalir ke arah positif sumber tegangan. Sedangkan hole akan mengalir ke arah negatif sumber tegangan, yang memungkinkan arus listrik mengalir dalam rangkaian elektronika. Dari penjelasan di atas, didapat kesimpulan bahwa semakin besar intensitas cahaya yang diterima oleh photodioda, maka semakin besar pula pasangan elektron dan hole yang dihasilkan. Sejauh ini, sensor photodioda memiliki tanggapan terbaik jika menyerap cahaya dari inframerah, yaitu di cahaya dengan panjang gelombang 0,9 µm.
Cara kerja LED
IR LED dipasang pada line follower dengan posisi yang ditunjukan pada Gambar 2 dimana saat IR LED memancarkan cahaya infrared atau cahaya panas dan cahaya tersebut mengenai permukaan line atau garis yang dapat memantulkan cahaya maka cahaya tersebut dipantulkan lalu diterima oleh photodiode.

Disarankan meletakkan LED seperti possisi disamping. dikarenakkan karena cahaya lebih mudah dipantulkan objek dibanding peletakan IR LED dan photodiode tegak lurus dengan line atau garis.
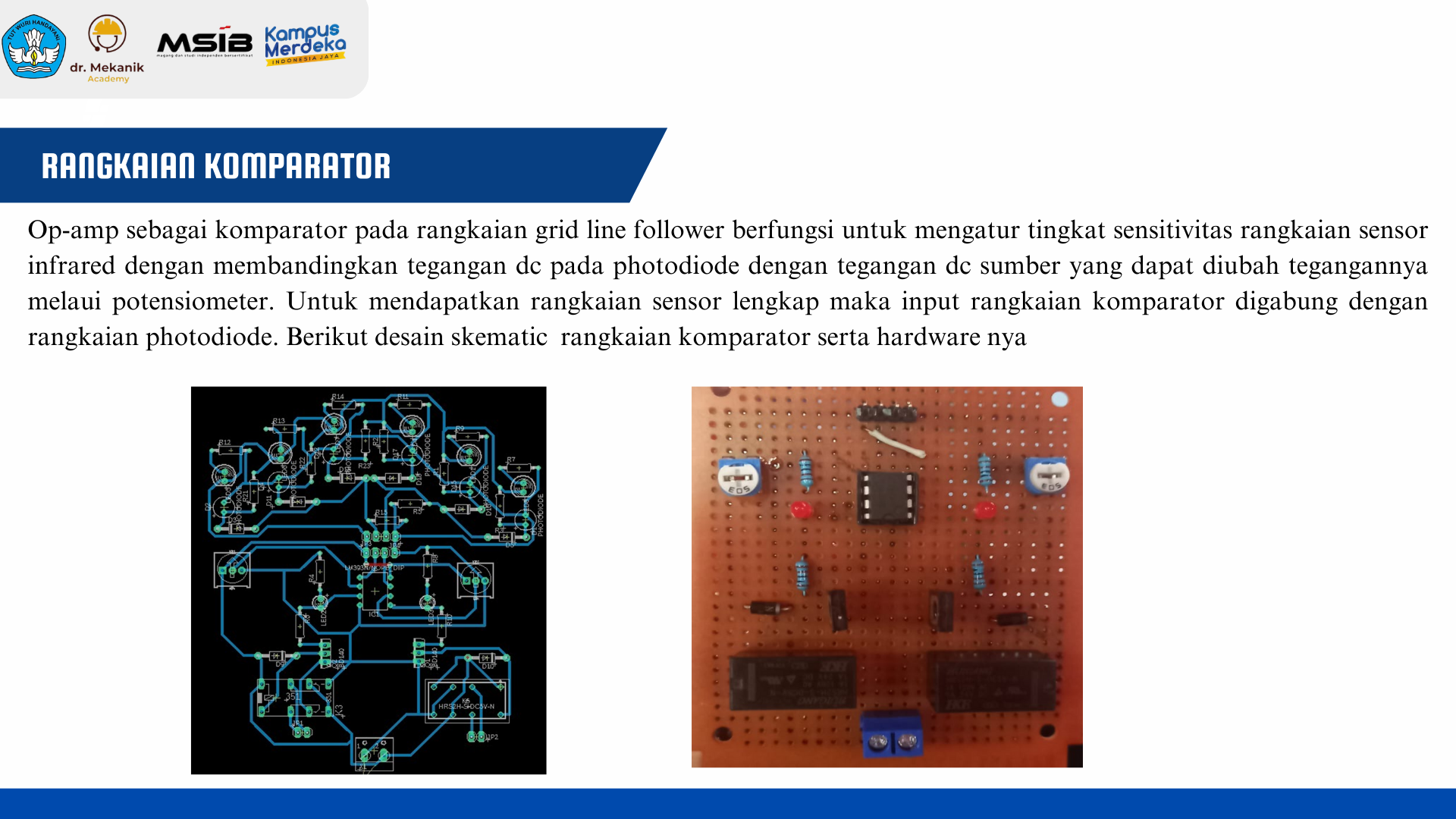
Cara Kerja Komparator
Op-amp sebagai komparator pada rangkaian grid line follower berfungsi untuk mengatur tingkat sensitivitas rangkaian sensor infrared dengan membandingkan tegangan dc pada photodiode dengan tegangan dc sumber yang dapat diubah tegangannya melaui potensiometer. Untuk mendapatkan rangkaian sensor lengkap maka input rangkaian komparator digabung dengan rangkaian photodiode..