Engineer Program
Program upgrade skill di bidang engineering, dari dasar hingga mahir.



Spesial Program
Program khusus melalui platform mitra resmi dokter mekanik academy seperti Udemy, Prakerja, dan Kampus Merdeka.
Program upgrade skill di bidang engineering, dari dasar hingga mahir.
Program khusus melalui platform mitra resmi dokter mekanik academy seperti Udemy, Prakerja, dan Kampus Merdeka.
Sertifikasi BNSP
Pilih pelatihan dan sertifikasi Nasional BNSP di bidang engineering, rekayasa, manufaktur, dan subsetnya
Lihat SemuaSertifikasi Internasional
Pilih pelatihan dan sertifikasi Internasional di bidang engineering, rekayasa, manufaktur, dan subsetnya
Lihat Semua
Temukan inspirasi dari hasil karya dan pengalaman para alumni dr. Mekanik Academy.

dr. Mekanik Academy tersedia di berbagai platform mitra resmi untuk memudahkan akses pelatihan Anda.

Jelajahi produk dan layanan lainnya dari ekosistem dr. Mekanik untuk solusi bisnis yang komprehensif.
dari dr. Mekanik Academy
Membantu kamu belajar, berkarya, dan bikin projek engineer dengan instan dan presisi!
Kumpulin Token Bareng AI Assistant dr. Mekanik!
Semakin aktif, semakin banyak token yang bisa kamu dapat!
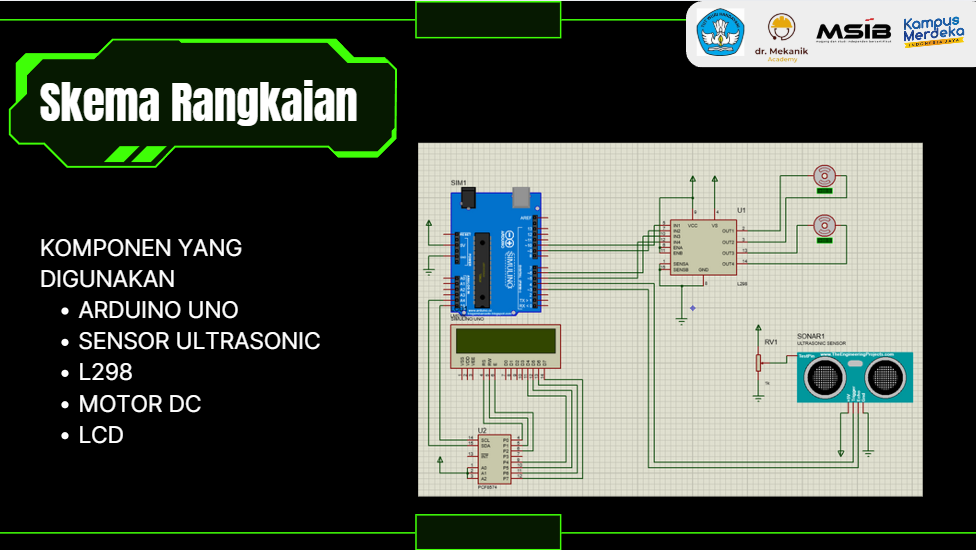
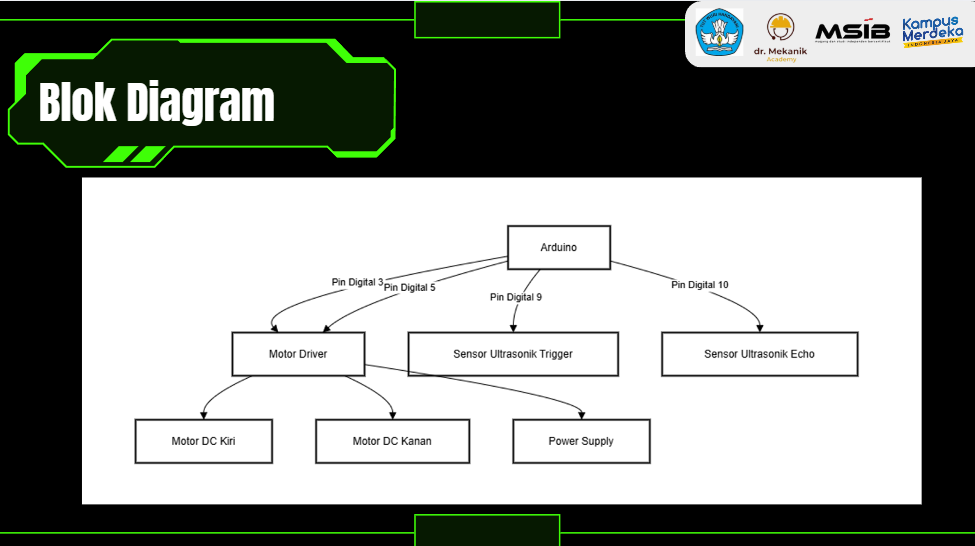
Robot Avoider (Halang Rintang): Proyek ini bertujuan untuk merancang dan mengimplementasikan robot penghindar rintangan berbasis Arduino. Robot ini menggunakan sensor ultrasonik untuk mendeteksi rintangan di jalur pergerakannya dan mengontrol motor DC untuk menghindari rintangan tersebut. Robot ini dilengkapi dengan motor driver L298N untuk mengontrol dua motor DC dan sebuah LCD display yang terhubung melalui PCF8574 I/O Expander untuk menampilkan jarak ke rintangan.
Robot Avoider (Halang Rintang):
Proyek ini bertujuan untuk merancang dan mengimplementasikan robot penghindar rintangan berbasis Arduino. Robot ini menggunakan sensor ultrasonik untuk mendeteksi rintangan di jalur pergerakannya dan mengontrol motor DC untuk menghindari rintangan tersebut. Robot ini dilengkapi dengan motor driver L298N untuk mengontrol dua motor DC dan sebuah LCD display yang terhubung melalui PCF8574 I/O Expander untuk menampilkan jarak ke rintangan.
Fitur Utama:
Deteksi Rintangan: Menggunakan sensor ultrasonik HC-SR04 untuk mengukur jarak ke rintangan di depan robot.
Pengendalian Motor: Menggunakan motor driver L298N untuk mengontrol motor DC kiri dan kanan, memungkinkan robot bergerak maju, mundur, dan berbelok.
Tampilan Jarak: LCD display menampilkan jarak rintangan yang terdeteksi, membantu dalam monitoring performa robot.
Algoritma Penghindaran: Logika pemrograman yang memastikan robot dapat menghindari rintangan secara efisien dan melanjutkan perjalanan tanpa hambatan.
Komponen Utama:
Arduino Uno sebagai mikrokontroler utama.
Sensor ultrasonik HC-SR04 untuk deteksi rintangan.
Motor driver L298N untuk mengontrol motor DC.
PCF8574 I/O Expander untuk koneksi LCD display melalui I2C.
LCD display untuk menampilkan informasi jarak.
Hasil Proyek: Robot avoider berhasil dikembangkan dan diuji pada berbagai jalur dengan rintangan. Robot dapat mendeteksi rintangan pada jarak tertentu dan mengubah arah untuk menghindarinya, sambil menampilkan jarak yang terukur pada LCD display. Proyek ini menunjukkan kemampuan pemrograman dan perakitan komponen elektronik secara efektif.