Engineer Program
Program upgrade skill di bidang engineering, dari dasar hingga mahir.



Spesial Program
Program khusus melalui platform mitra resmi dokter mekanik academy seperti Udemy, Prakerja, dan Kampus Merdeka.
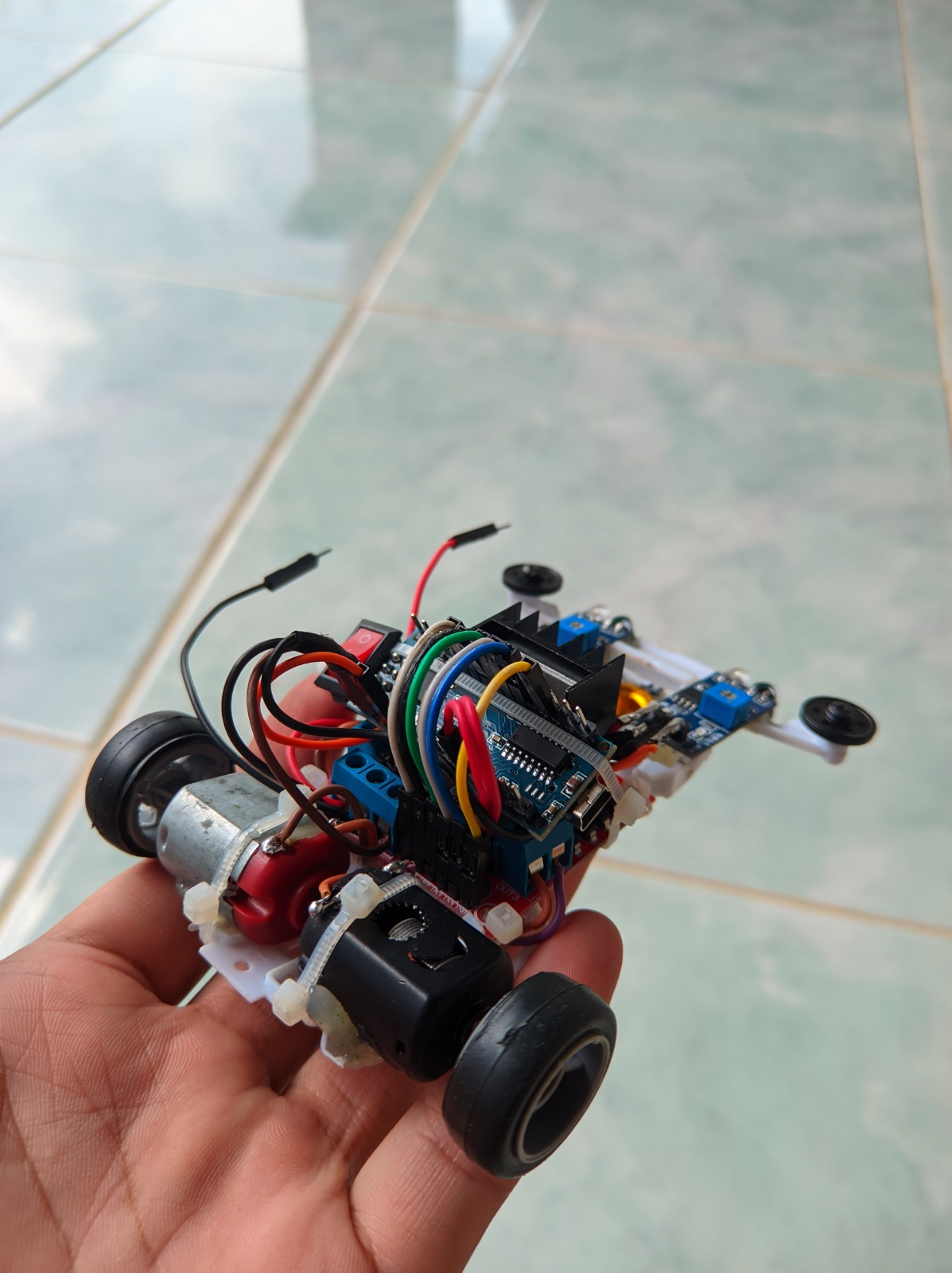
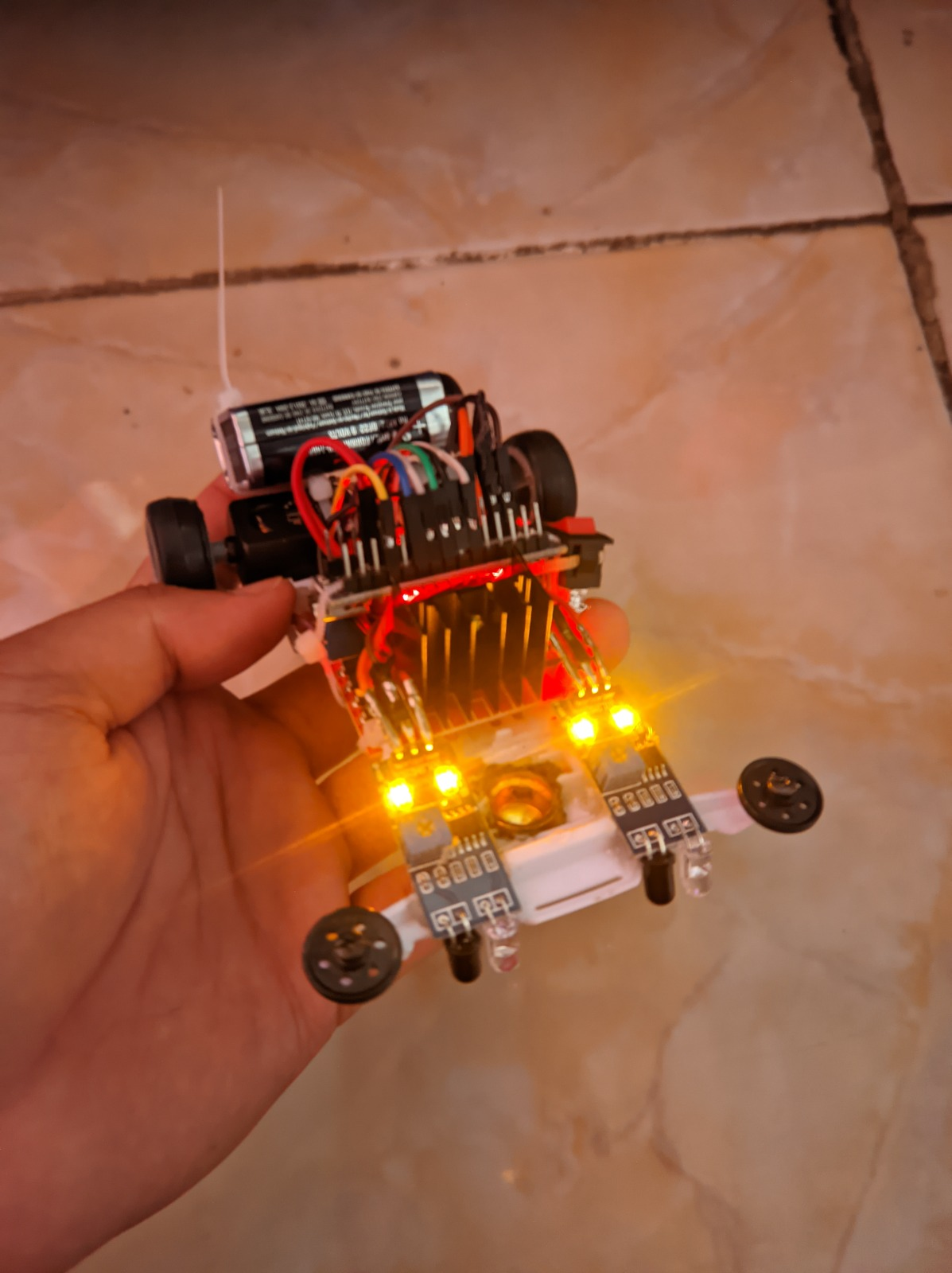
Robot line follower berbasis Tamiya ini adalah robot otonom yang dirancang untuk mengikuti jalur menggunakan sensor inframerah sebagai pendeteksi garis dan Arduino Uno sebagai pengendali utama. Sasis Tamiya digunakan sebagai kerangka, dengan motor DC untuk penggerak. Algoritma PID diterapkan untuk memastikan pergerakan yang stabil dan akurat. Robot ini berhasil diuji pada lintasan sederhana dengan performa baik, meskipun pengembangan lebih lanjut diperlukan untuk mendukung skenario yang lebih kompleks.
Pendahuluan
Robot line follower adalah robot otonom yang dirancang untuk mengikuti jalur tertentu menggunakan bantuan sensor. Proyek ini bertujuan untuk memanfaatkan platform Arduino Uno sebagai pengendali utama, mengintegrasikan sensor inframerah untuk mendeteksi jalur, dan menggunakan sasis Tamiya sebagai kerangka dasar. Robot ini diharapkan dapat mengikuti jalur dengan stabil, baik di lintasan lurus maupun pada belokan tajam.
Penggunaan teknologi ini dapat menjadi dasar untuk aplikasi yang lebih kompleks seperti navigasi robotik di gudang, pengiriman barang otomatis, atau kendaraan tanpa pengemudi. Proyek ini juga dirancang untuk memberikan pemahaman praktis mengenai konsep sensorik, kontrol motor, dan algoritma navigasi berbasis mikroprosesor.
Proses Pembuatan
Materi dan Metode
Bahasa Pemrograman
Kode program ditulis menggunakan Arduino IDE dengan bahasa berbasis C/C++. Algoritma utama meliputi:
kode sederhana:
#include <PID_v1.h>
// Pin sensor
const int sensorKiri = A0;
const int sensorKanan = A1;
// Pin motor
const int motorKiri = 9;
const int motorKanan = 10;
// Variabel PID
double setpoint = 0;
double input, output;
const double Kp = 2.0, Ki = 0.5, Kd = 1.0;
PID myPID(&input, &output, &setpoint, Kp, Ki, Kd, DIRECT);
void setup() {
pinMode(sensorKiri, INPUT);
pinMode(sensorKanan, INPUT);
pinMode(motorKiri, OUTPUT);
pinMode(motorKanan, OUTPUT);
myPID.SetMode(AUTOMATIC);
}
void loop() {
int nilaiKiri = analogRead(sensorKiri);
int nilaiKanan = analogRead(sensorKanan);
input = nilaiKanan - nilaiKiri;
myPID.Compute();
analogWrite(motorKiri, 150 + output);
analogWrite(motorKanan, 150 - output);
}
Hasil dan Pembahasan
Hasil pengujian menunjukkan bahwa robot dapat mengikuti jalur dengan tingkat akurasi yang cukup baik. Pada lintasan lurus, robot bergerak stabil dengan sedikit osilasi. Pada lintasan berbelok tajam, algoritma PID membantu menjaga posisi robot tetap di jalur tanpa kehilangan arah.
Namun, beberapa kelemahan ditemukan:
Untuk mengatasi kelemahan ini, pengembangan lanjutan dapat mencakup:
Kesimpulan
Robot line follower berbasis Arduino Uno dengan sensor inframerah dan sasis Tamiya berhasil dirancang dan diuji. Robot mampu mengikuti jalur dengan tingkat akurasi yang baik, meskipun terdapat beberapa batasan yang perlu diperbaiki di masa depan. Proyek ini menunjukkan bahwa teknologi sederhana seperti Arduino dapat digunakan untuk implementasi robotika dasar.
Daftar Pustaka